 Extend Robotic Set 02 (ERS02) je
výuková pomůcka a motivační prostředek určený pro podporu technického
vzdělávání na úrovni vyššího stupně základních škol, středních
odborných, vyšších a vysokých škol.
Extend Robotic Set 02 (ERS02) je
výuková pomůcka a motivační prostředek určený pro podporu technického
vzdělávání na úrovni vyššího stupně základních škol, středních
odborných, vyšších a vysokých škol.
Své uplatnění najde i jako náplň volnočasových aktivit gymnázií a domech dětí a mládeže.
Umožňuje praktické procvičování úloh spojených se studiem problematiky průmyslové automatizace, robotizace a programování.
Set tvoří stavebnice plně funkčního robotického pásového vozidla s diferenciálně řízeným podvozkem a věží, disponující dvěma stupni volnosti.
Cílem setu je seznámit studenty se základy konstrukce autonomních robotů, jejich ovládáním a řízením.
Set je možné použít, buď jen jako motivační prostředek, kdy student/žák intuitivní cestou řeší zábavnou úlohu, nebo jako výukový prostředek, kdy student řeší povelové řízení systémů v kombinaci s autonomními funkcemi. Vlastní pohyb vozidla a věže je řízen PSD regulátory.
Správným uchopením setu a pod vedením zkušeného pedagoga, práce studenta na tomto setu vydá za hodiny teoretické výuky na téma „povelové řízení, regulace a měření“.
Set je rozšířením základní sady BLS.
Set rozvíjí týmovou práci a tvůrčí přístup. Vybízí k hledání originálních řešení za pomocí experimentů.
Dodávka obsahuje:
| Označení | Popis | Množství |
|---|---|---|
| sada | Kovové a plastové montážní díly | 1 |
| MEMO02 | LI-POL Baterie s nabíječkou | 1 |
| 1496 | DC motor | 2 |
| ME1401 | RC analogový servomotor | 2 |
| sada | Propojovací kabely k senzorům a modulům | 1 |
| sada | Montážní nástroje a přípravky | 1 |
| CAD 3D modely a návody ve formátu skp | 1 | |
| Instalační CD s programy a příklady | 1 |
Modely setu
| Id | Název | Množství | Vyobrazení |
|---|---|---|---|
| 0007L | 0007L Pásový robot, bezdrátový systém řízení, platforma | 1 | 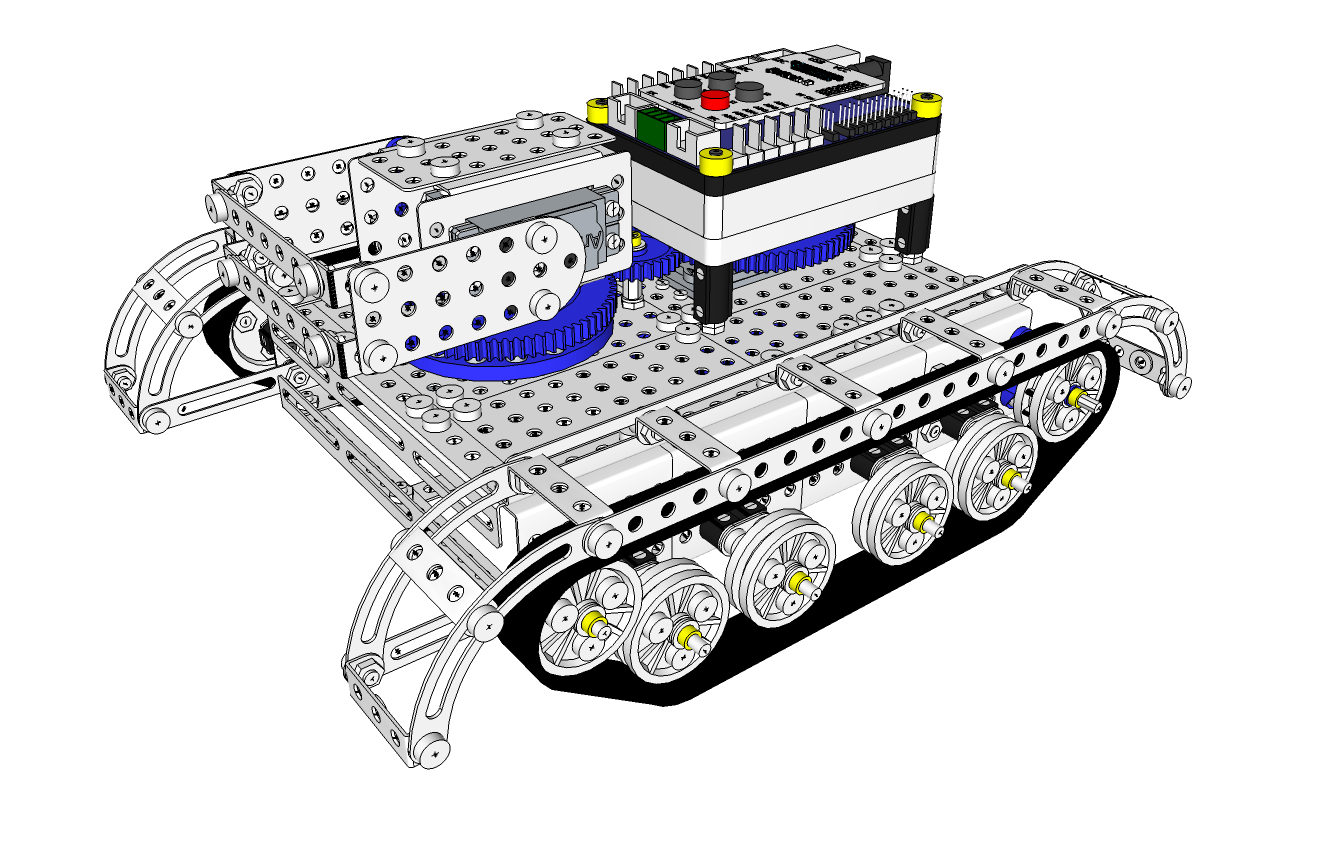 |
Výuková témata setu
- Logické řízení
- Booleova algebra
- Logické funkce
- Algoritmus PLC
- Programování PLC pomocí imperativního programovacího jazyka
- Programování PLC pomocí pomocí programových grafů
- Spojité systémy
- Analýza signálu, detekce náběžné hrany
- Shannonův-Kotělnikovův teorém
- Řízení, ovládání, regulace
- Regulátor PSD, absolutní a přírůstkový tvar
- Syntéza regulačního obvodu, perioda, proporcionální člen, integrální a derivační člen
- Snímače, kalibrace snímačů, vliv prostředí na měřenou hodnotu
- Měření polohy, otáček, frekvence
- Akční členy
- Převody pohybů, převodový poměr, čelní převod
- Elektrické pohony
- Stejnosměrné motory
- Pulsně šířková modulace
- Sériový terminál
- Rozdělení robotů
- Stacionární roboty
- Mobilní roboty
- Diferenciální podvozek
- Snímače a senzory
- Snímače polohy
- Snímač otáček a úhlů
- Řídící obvody
- Navigační technologie